Transformer-DST
1. Key Idea
- 이전 논문들에서는 Encoder에서 BERT를 사용하지만, Value Generation부분에서는 RNN Decoder를 사용하는 아이러니..
- Purely Transformer-based framework를 사용 즉, Single BERT가 Encoder와 Decoder 모두에서 work → 이렇게 하면 prediction objective와 value generation objective가 BERT 하나만 optimize하게 됨
- Encoder(BERT)에서 사용한 hidden states 값을 Decoder(BERT)에서 Re-use가 가능해짐
2. Input
- Input으로는 SOM-DST와 같은 구조를 지님
- 아래 그림과 같이 D1, D2, S1을 INPUT으로 넣고, OUTPUT으로 S2를 출력
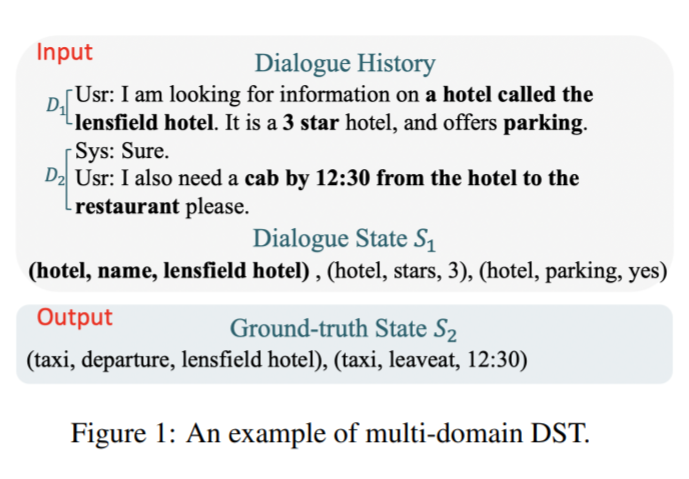
- 을 INPUT으로 를 PREDICT
- : t번째 dialogue turn의 (System utterance, User response) pair
- :
여기서 는 domain, 는 slot, 는 value를 나타냄
만약, 아무 정보도 없을시 로 나타내고, 는 NULL
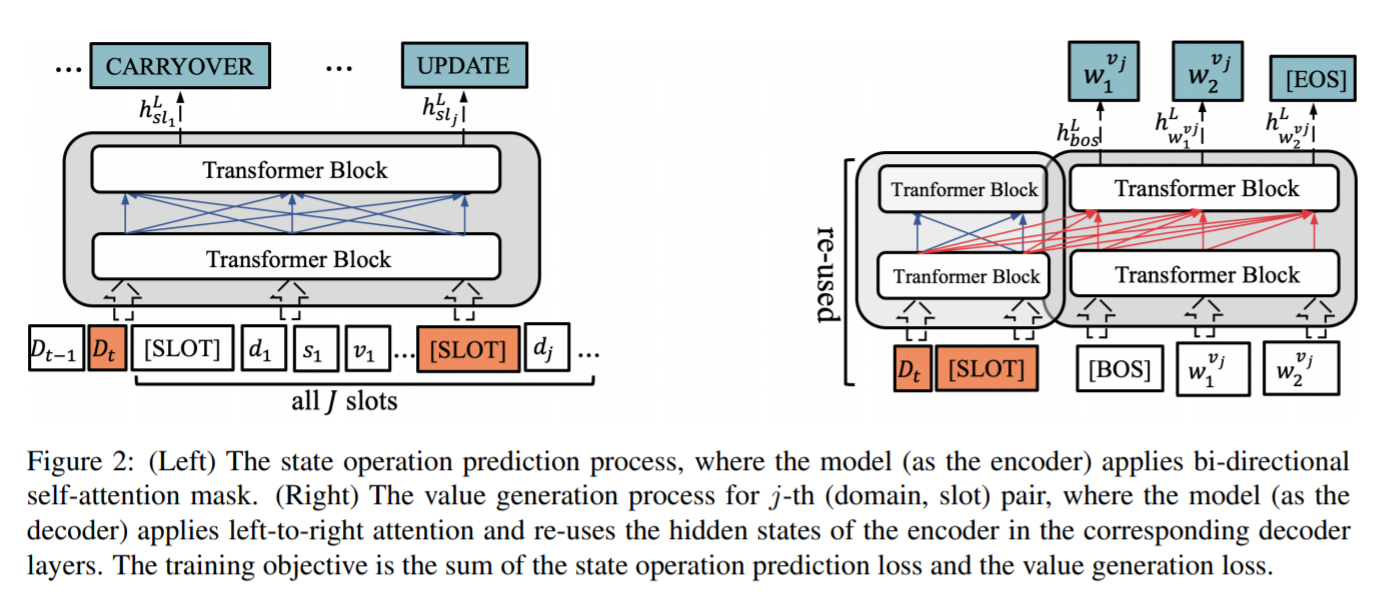
3. Overview
- 왼쪽은 Transformer Encoder, 오른쪽은 Transformer Decoder
- Encoder (왼쪽)에서 (hidden state)를 뽑아내고, Decoder (오른쪽)에서 Re-use하는 방법으로 사용됨
- Decoder (오른쪽)은 left-to-right attention (왼쪽에서 오른쪽으로 차례로 출력하는 language model, 즉 왼쪽 출력값이 오른쪽 입력)
4. Encoder
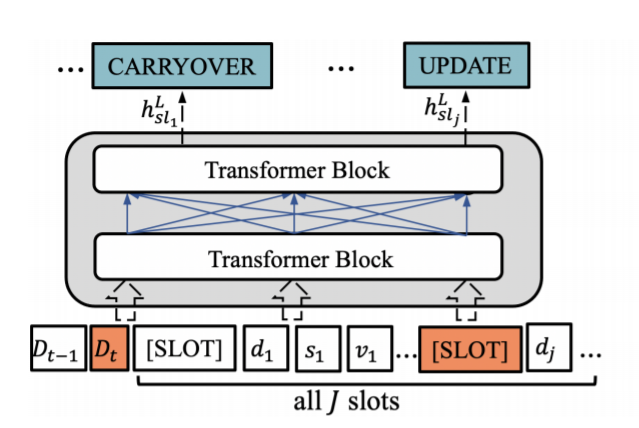
-
Encoder의 Input은 3가지가 들어감
- 는 t번째 turn의 ( System Utterance, User Resposne ) pair
- 은
4-1) Encoder Input

-
으로 구성
- 는 concat을 나타냄
- 총 개의 domain-slot에 대해서 만들어줌
- * J번
- 은 Transformer block을 통과한 후, 형태로 출력되며, Prediction (CARRYOVER, ..., UPDATE 등)으로 사용됨
4-2) Multi-head self-attention

- Multi-head Self-attention 매카니즘 사용

-
여기서 : self-attention mask matrix
- 이면 i-th position이 j-th position에 attend하다는 의미
- 이면 i-th position과 j-th position을 prevents하겠다는 의미
4-3) Encoder Output
4-4) Encoder Objective
- Encoder outputs 에서 칸에 해당하는 값을 확인
- CARRYOVER, DELETE, DONTCARE, UPDATE
- UPDATE의 경우에만 decoder generater에서 사용함
5. Decoder (Slot Value Generation)
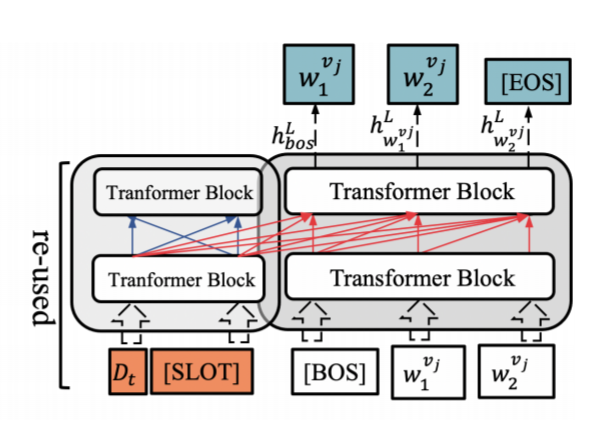
- Left-to-right self-attention을 사용함
- Encoder에서 도출해낸 hidden states를 decoder에서 reuse
- Resue의 의미는 hidden state를 decoder에서 다시 한번 계산할 필요가 없어진다는 의미를 갖음.
5-1) Decoder Input

-
Encoder (reuse)
- 왼쪽의 와 은 Encoder 부분을 나타냄
- 현재 turn의 의 hidden state vector를 사용함
- 중 UPDATE로 prediction이 된 hidden state vector만 사용함
-
Decoder
- 는 String의 시작
- 는 decoder의 output을 다시 input으로 가지고 와서 사용 (left-to-right self-attention)
5-2) Left-to-right self-attention


- 일반 Multi-head attention하고 비슷
- : re-used된 encoder hidden states
- : Decoder hidden states
- 와 를 concat해서 사용
- 만약 일때, 으로 사용 (left-to-right attention)
5-3) Decoder Objective
- Generated slot value loss와 ground-truth slot value를 비교해서 Loss를 산출
- Teacher Forcing을 모든 time에서 사용
결과
- MutliWOZ 2.0과 MultiWOZ 2.1에서 제출 당시 SOTA

-
각각의 Domain의 Joint goal Accuracy를 비교
- 신기한 점은 Taxi 빼고 (다른 모델보다) 높은 성능을 보임
- 이유를 찾아보니 Taxi의 경우 Train과의 co-occurrence relations가 있음
- 하지만 Ours에는 이러한 점을 해결하려고 하지는 않았음

- 시간의 경우 SOM-DST보다는 Inference time이 오래걸림

- Reuse를 사용했을 경우에도 여러가지 방법을 시도해보았고, 을 사용했을 때 Joint Accuracy에서 좋은 성능을 보였음
